Let us revisit the shortest path problem in graphs. We are given an edge weighted graph, a source and a destination vertex 

The problem in general graphs can be shown to be 
1. Minimum Obstacle Removal: Given a collection of geometric objects in the plane, and two points s,t, find a simple curve between s and t that intersects the interior of the minimum number of objects. The problem appears naturally in robot path planning.
We can construct a graph from the input instance in the following way. Consider a vertex placed on each cell of the input arrangement. For each vertex, associate the set of objects corresponding to its cell. Join two vertices with an edge if the two cells are adjacent. Basically the graph is the dual graph of the planar input arrangement, and hence planar. Then an optimal obstacle removal path is a path in this graph that has the minimum size union of the sets corresponding to its vertices.
2. Minimum Barrier Resilience: Given a collection of wireless sensor regions, represented by disks in the plane, two points
An 

Unit squares: 2 approximation.
Unit disks: 3 approximation
Minimum constraint removalGeneral squares/disks: No sublinear approximation is known.
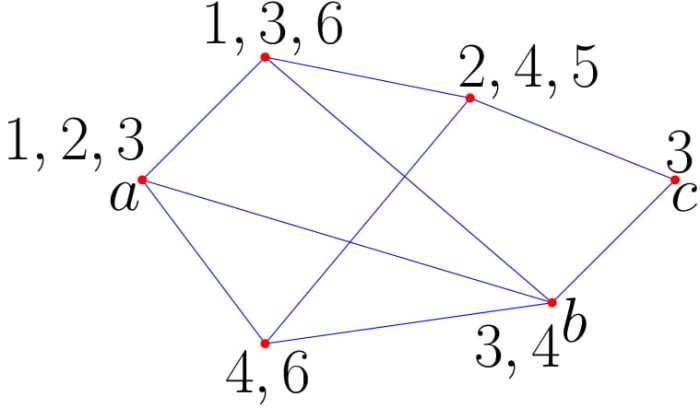
In the following, we discuss an algorithm for MCP. Let me just take a step back and discuss a Dynamic programming based algorithm for standard shortest path – Floyd-Warshall. For any path, call a vertex exposed if it is one of the two end vertices. Otherwise, it is hidden. Note that any s-t path will have a fixed cost, which is the sum of the weights of s and t. Thus we always consider only the hidden vertex costs for a path. At last we can add the fixed cost to find the total cost of the path. The DP formulation is as follows, where $S_k$ is the set corresponding to the vertex k.

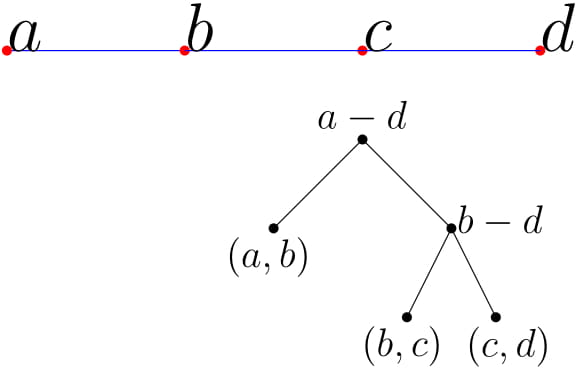
One way to analyze this algorithm is the following. We show the existence of a witness tree (binary) which emulates the computation of the algorithm. The root is corresponding to an optimal s-t path. Each leaf is corresponding to an edge. For each internal node, merge the paths of the two children to find a path for the node. Here is an example.
So, this algorithm surely does not work for our case, as it might charge the same color a lot of times. But, note that to address the multiple counting issue, we can come up with some discounting scheme, where we try to avoid the multiple counting. Let’s consider the following discounting scheme. We charge a color while merging if it appears in k, but not in i or j. The modified DP formulation is as follows.
$latex d_t(i,j)=\min\{\min_k d_{t-1}(i,k)+d_{t-1}(k,j)+|S_k\setminus \{S_i\cup S_j\}|,d_{t-1}(i,j)\}$
Let us take a simple example to see how does this scheme work.

Here the graph is a path, and contains two colors a and b.

Thus the discounting scheme can detect almost half of the double countings. To improve the bound let us consider another strategy. The discounts would be more accurate if we keep more exposed vertices. So, we index by two paths now instead of just one path. And, you always do not charge a color if it appears in one of the exposed vertices. The algorithm is called 2-path algorithm (in general Multipath algorithm). For our previous example the hidden cost is thus zero as shown in the following derivation of the optimal path.
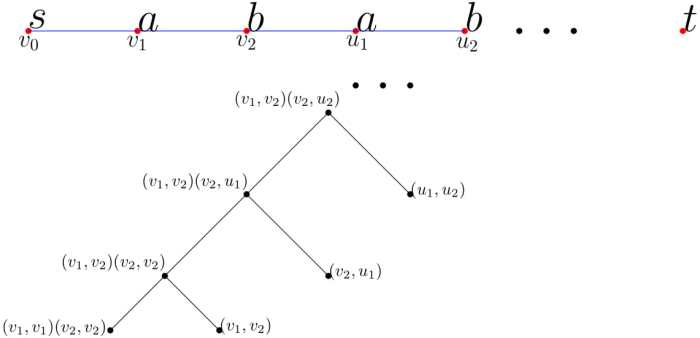
Here all the colors are appearing in one of the exposed vertices. Thus if k is |OPT|, then k-path algorithm is sufficient to find the optimal cost. But runtime depends exponentially on k.
Analysis of the Multipath Algorithm: While computing the path in bottom up manner we see that for two vertices 


See this paper for more details.
